Overview
The So-Rad is a low-power, low cost autonomous system to obtain high-frequency water-leaving reflectance from non-stationary platforms such as ships and buoys. So-Rad software is highly configurable and open-source. So-Rad optimizes the measurement geometry of commercially available sensors which increases the number of successful observations of water colour obtained from moving platforms (
Simis and Olsson 2013).
Hyperspectral water-leaving reflectance is used to determine diagnostic features in water colour that can be associated with phytoplankton biomass, suspended solids and dissolved organic matter concentration.
Observing in situ reflectance with sensors on the So-Rad is used to validate satellite observations, particularly the performance of algorithms that separate atmospheric and water-leaving radiance, which have high uncertainty in optically complex waters such as coastal seas and inland waters. High-quality reference measurements are required, collected under optimal observation conditions (solar and viewing azimuth, sun elevation).
Added Value of So-Rad
- Off-shore satellite validation is currently limited to research vessels and fixed moorings that are costly to maintain. The So-Rad can be installed on non-stationary platforms and is ideally suited to be included on merchant vessels. Ferry routes are recommended because of predictable routes and schedules. Periodic sensor maintenance can be easily carried out by non-expert crew.
- A high degree of automation and low-power components means the platform can be installed in remote locations for autonomous operation.
MONOCLE has realised a low-cost, low-power, sustainable option for in situ hyperspectral radiometry with the So-Rad.
- Platform position and heading, with high accuracy (better than 1° for heading and < 1m for position) by default. For fixed installations this can be substituted by a simple GNSS receiver (lower purchase cost)
- Solar elevation and azimuth angle (derived from positioning data)
- Achieved sensor viewing azimuth angle relative to the solar azimuth (user-configurable)
- Solar / battery charge status (Victron protocol, optional)
- Hyperspectral (ir)radiance from connected TriOS RAMSEs sensors (user-configurable measurement frequency). Sensors are simultaneously triggered to observe the physics of water-leaving reflectance. One sensor (normally downwelling irradiance) can be separately triggered at set intervals, regardless of set limits for solar elevation and allowable viewing angle
- Tilt, pitch and roll
- Control box temperature and relative humidity
- Ambient temperature and relative humidity (under development)
At user-configurable intervals, the So-Rad carries out a series of checks to determine whether environmental conditions meet user-configured conditions for reflectance measurements. These conditions include reliable positioning information, the solar geometry, available battery charge (if not connected to net power), platform movement, and desired measurement frequency. If all conditions are met, the system calculates any adjustments of the motor that are required to obtain the most favourable viewing angle. To conserve power, minor adjustments can be skipped per user settings. Subsequently, connected spectroradiometers will be triggered and their data retrieved. The So-Rad will handle any time-outs that may occur in the external sensors and reset them if any sensor becomes permanently unresponsive.
All operations are logged in text files and sensor data and metadata are stored in a local database. Operators can remotely log on to the system to look at the log files. The So-Rad additionally hosts a local Wi-Fi network that can be used on site to access and configure the system and the internet if there is 3G connectivity or better.
A remote SOS compliant data server can be configured in the software to upload observation data at regular intervals. This allows the data to be distributed in near real time.


Technical drawing
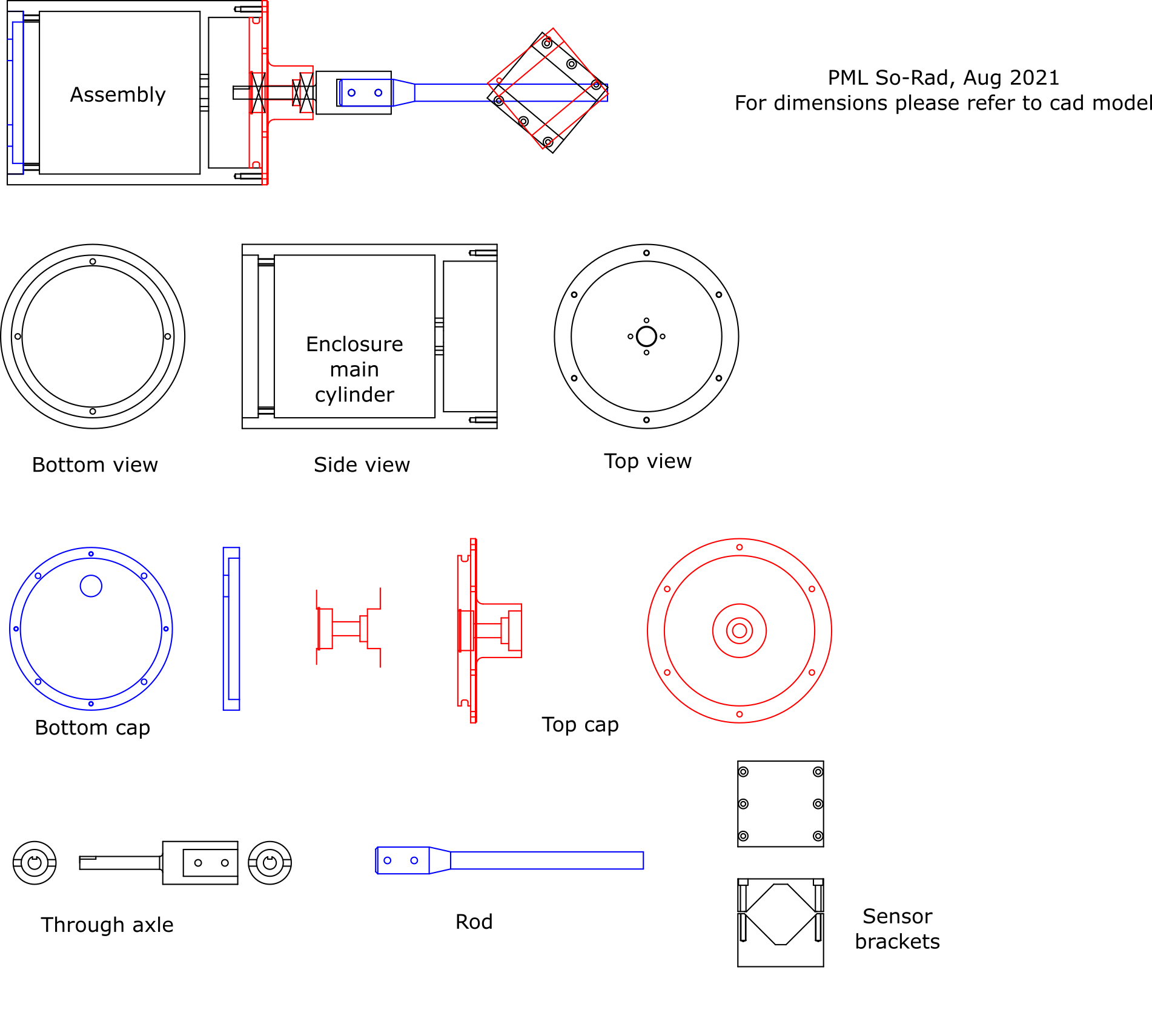
So-Rad component 2D CAD drawings
Mount on a ship or buoy with a wide unobstructed view of the sea. The downwelling irradiance sensor should have a clear view of the sky in all upward directions. Installation consists of attaching the deck box, motor enclosure, and two GPS antennas.
We provide several interoperable data interfaces, as detailed below:
Type of data: Hyperspectral Radiance, Reflectance data collected using the Solar-tracking radiometry platform.
Format: WMS, WFS (calibrated and calculated products)
Front-end
(Layers: search for 'sorad')
- rsg:sorad_public_view_fp_rrs (Rrs from Fingerprint algorithm)
- rsg:sorad_public_view_3c_full (Rrs from 3C algorithm, radiance spectra)
- rsg:sorad_public_view_fp_full (Rrs from FP algorithm, radiance spectra)
- rsg:sorad_public_view_meta (System and location metadata only)
- rsg:sorad_public_view_activity (Activity per instrument platform)
WMS GetCapabilities
WFS GetCapabilities
Dashboard
Supporting materials
User guide: So-Rad Solar-Tracking Radiometry Platform: Deployment and Operation
Webinar: Automation and retrieval of Remote-sensing reflectance from ships of opportunity
Download the operational protocols for MONOCLE sensors and platforms
This document provides a set of protocols for
the deployment of MONOCLE systems to ensure best practices to collect reliable data.
System user and developer handbook This handbook provides an overview of the data requirements and interfaces that were adopted in the sensors and observation platforms of MONOCLE.
Construction Guide of the Solar-tracking Radiometry platform (So-Rad)
Software on Github
The data below shows recent sensor deployment activity. Access more detail and explore other sensor deployment activity on the MONOCLE dashboard .